4 Merjenje ponovljivosti industrijskega robota
Ponovljivost opisuje deviacijo povpre
ˇ
cja napak pri doseganju dolo
ˇ
cene lege. Ponovljivost ni napaka, ki bi
bila izražena glede na bazni koordinatni sistem, ampak je to deviacija povpre
ˇ
cja napak. Izraža razpršenost
lege pri premiku robota v zahtevano lego n-krat iz iste smeri. Mednarodni standard ISO9283 definira
pomembne karakteristike, ki dolo
ˇ
cajo zmogljivost robotov, opisuje na kakšen na
ˇ
cin naj bodo dolo
ˇ
cene ter
predlaga, kako jih izmeriti. Ena izmed karateristik je ponovljivost pozicije vrha robota, ki je po standardu
ISO9283 definirana z ena
ˇ
cbo:
r =
¯
l + 3s (1)
kjer je
¯
l =
1
n
n
X
i=1
l
i
(2)
l
i
=
q
(x
i
− ¯x)
2
+ (y
i
− ¯y)
2
+ (z
i
− ¯z)
2
(3)
s =
s
P
n
i=1
(l
i
−
¯
l)
2
n − 1
(4)
V ena
ˇ
cbi (3) nastopajo
ˇ
cleni x
i
, y
i
, z
i
, ki predstavljajo posamezne od
ˇ
citke koordinat pozicije vrha robota v
dolo
ˇ
ceni to
ˇ
cki,
x, y, z pa so povpre
ˇ
cne vrednosti vseh od
ˇ
citkov.
Standard ISO9283 predpisuje merilne pogoje, ki vklju
ˇ
cujejo zahteve glede elektri
ˇ
cnih motenj, tempe-
rature in ostalih vplivov okolja. Standard predpisuje, da mora robot biti v stabiliziranih pogojih delovanja,
meritve pa morajo biti izvedene s 100% obremenitvijo (opcijsko tudi z 10%) ter hitrostjo gibanja 100%,
50% in 10% deklarirane najvišje hitrosti. Meritve se izvajajo dolo
ˇ
cenih to
ˇ
ckah delovnega prostora, ki so
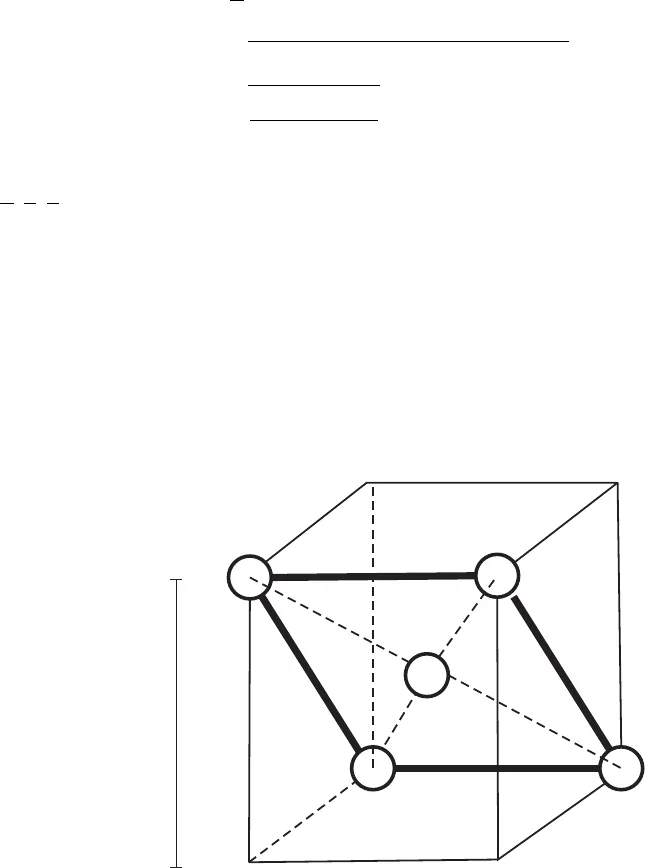
definirane s t.i. ISO kocko s predpisanim številom ponovitev. ISO kocka je kocka znotraj delovnega pro-
stora robota, kjer se pri
ˇ
cakuje najve
ˇ
c gibanja robota med delovanjem. Dolžina stranic kocke mora biti
maksimalna glede na delovno podro
ˇ
cje robota. Na sliki 11 je prikazana varianta merilnih to
ˇ
ck dolo
ˇ
cenih z
ISO kocko v delovnem prostoru robota.
(1)
(2)
(3)
(4)
(5)
80%
delovnega
prostora
Slika 11: Merilne to
ˇ
cke v delovnem prostoru robota v katerih dolo
ˇ
camo ponovljivost
11