5 Navodila za izvedbo vaje
Naloga zahteva dolo
ˇ
citev ponovljivosti robota EPSON RS3 v eni to
ˇ
cki delovnega prostora pri dveh obre-
menitvah. Merilna to
ˇ
cka je dolo
ˇ
cena v notranjosti kovinske kocke nameš
ˇ
cene v delovnem prostoru robota.
Potrebno je izmeriti ponovljivost v to
ˇ
cki, ki je 5 mm oddaljena od robov kocke, kot to prikazuje slika 12.
x
0
y
0
z
0
x
y
z
-5
5 5
baznikoordinatnisistem
koordinatnisistem
merilnekocke
merilnatočka
Slika 12: Merilna to
ˇ
cka v notranjosti merilne kocke in lokalni koordinatni sistem pripet na kocko
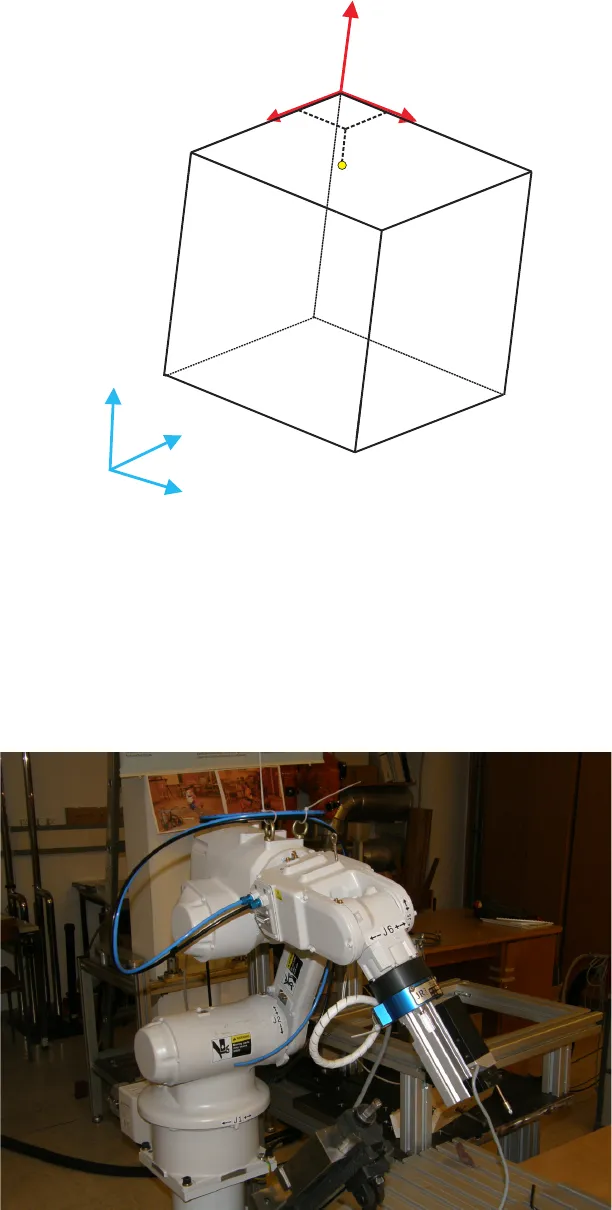
Pri izvedbi preciznih meritev ponovljivosti pozicioniranja robota uporabite elektronski mikrometer, ki
meri premik merilne konice vzdolž ene dimenzije. Mikrometer je na robot nameš
ˇ
cen kot kaže slika 13. V
zapestju robota je nameš
ˇ
cen štiriosni senzor sil in momenta, ki v primeru prevelikih obremenitev mikrome-
tra izklju
ˇ
ci motorje robota.
Slika 13: Fotografija merilnega sistema za merjenje ponovljivosti
Ker uporabljeni merilni sistem meri premik le vzdolž ene dimenzije, je za dolo
ˇ
citev ponovljivosti po-
trebno opraviti tri serije meritev, lo
ˇ
ceno za vsako smer posebej. V vsaki seriji meritev robot opravi predpi-
12