3 Natan
ˇ
cnost doseganja lege industrijskega robota
Parametri, ki dolo
ˇ
cajo sposobnost pozicioniranja vrha robota v prostoru so lo
ˇ
cljivost, to
ˇ
cnost in ponovlji-
vost. Na parametre vplivajo to
ˇ
cnost kinemati
ˇ
cnega modela (dolžine segmentov, položaj osi), mehanske
lastnosti mehanizma in elektromehanske lastnosti pogonskega sistema (motorji, krmilnik).
Lo
ˇ
cljivost je definirana kot najmanjši inkrementalni premik, ki ga robot lahko opravi. Dolo
ˇ
cena je s
kvaliteto regulacijskega sistema, ki vodi motorje. Predvsem je pri lo
ˇ
cljivosti pomembna lo
ˇ
cljivost senzorjev
pozicije. Na lo
ˇ
cljivost pa vpliva tudi mehanska zgradba robota, t.j. podajnost segmentov in mrtvi hod v
sklepih.
To
ˇ
cnost ozna
ˇ
cuje robotovo zmožnost, da pozicionira vrh v dolo
ˇ
ceno lego znotraj delovnega prostora.
To
ˇ
cnost je odvisna od mehanskih lastnosti mehanizma, algoritmov vodenja in lo
ˇ
cljivosti. To
ˇ
cnost je možno
izboljšati z natan
ˇ
cnejšo izdelavo segmentov, s pove
ˇ
canjem togosti mehanizma (vendar pove
ˇ
canje mase
lahko upo
ˇ
casni robot), z uporabo kvalitetnejših senzorjev in regulacijskega sistema. Pomemben dejavnik pri
zagotavljanju absolutne to
ˇ
cnost doseganja lege robota je tudi razlika med ni
ˇ
cno pozicijo sklepov, zapisano
v krmilniku ter dejansko ni
ˇ
cno pozicijo sklepov. To
ˇ
cnost se spreminja glede na pozicijo vrha manipulatorja
v delovnem prostoru, saj so npr. obremenitve sklepov ve
ˇ
cje pri bolj iztegnjenem robotu.
Ponovljivost je zmožnost robota, da dosega dolo
ˇ
ceno lego vedno znova. Je statisti
ˇ
cni pojem, povezan
z natan
ˇ
cnostjo in opisuje kakšne so napake pri ponavljanju istih gibov.
ˇ
Ce robot programsko vodimo iz iste
lege v merjeno lego, vedno pri enakih vplivih okolja, z dolo
ˇ
cenim številom ponovitev, lahko opazimo, da
rezultati kažejo odstopanje od pri
ˇ
cakovane vedno iste vrednosti.
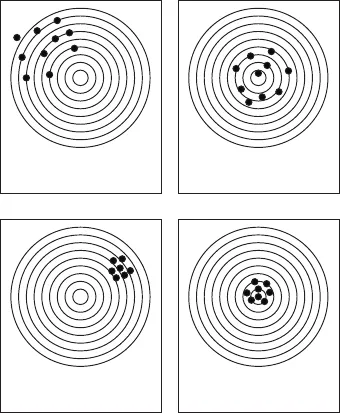
Grafi
ˇ
cno lahko parametra ponovljivosti in to
ˇ
cnosti ponazorimo s sliko 11.
dobra čnost
slabaponovljivost
to
slabatočnost
slabaponovljivost
slabatočnost
dobraponovljivost
dobra čnost
dobraponovljivost
to
Slika 10: To
ˇ
cnost in ponovljivost
Absolutna to
ˇ
cnost doseganja lege je pomembna pri zamenjavah robotov in indirektnem programiranju
preciznih aplikacij. Pri indirektnem programiranju je robotski program razvit v simulacijskem okolju in
samo prenešen v robotski krmilnik. Natan
ˇ
cnost izvajanja programa je odvisna od ujemanja modela robotske
celice in realne celice ter od to
ˇ
cnosti doseganja leg robota. Ponovljivost pa je pomembna pri direktnem
programiranju robota, kjer robot vodimo od to
ˇ
cke do to
ˇ
cke in lege shranjujemo v krmilnik. Robot nato med
delovanjem izvaja gibanje vzdolž ro
ˇ
cno dolo
ˇ
cene trajektorije. Ve
ˇ
cina proizvajalcev robotov v tehni
ˇ
cnih
karakteristikah svojih robotov raje podaja podatek o ponovljivosti kot o natan
ˇ
cnosti.
10