sano število ponovitev pozicioniranja v to
ˇ
cko iz dolo
ˇ
cene smeri (x, y, ali z). Ko se pri posamezni ponovitvi
vrh robota ustali v ciljni legi, je potrebno od
ˇ
citati vrednost premika merilne konice mikrometra.
y
z
ROBOTSKIKRMILNIK
EPSONRc170
z
y
EPSONRC+5.0
Matlab2007a
MIKROMETER
merilnatočka
OSEBNIRAČUNALNIK
RS232serijskapovezava
TCP/IP
Ethernet
povezava
s=beriopen;%odpricomport
fori=1:n
StartTestSequence(1)
%kopride
i =beri(s);
i=i+1;
%umikza30mmpozin
%pomiknazajvzacetnolego
vlego
x( )
%pomikvviatockoin
%pomikvmerilnotocko
StartTestSequence(0)
end
Main.prg
.
.
.
Select TestNumber
Case0
Callpremik_0
Case1
Callpremik_1
.
.
.
Functionpremik_0
MoveHere-TLZ(30)
GoStart
Fend
Functionpremik_1
GoPoint1_xPass
MovePoint1_x
Fend
klic
klic
povratek
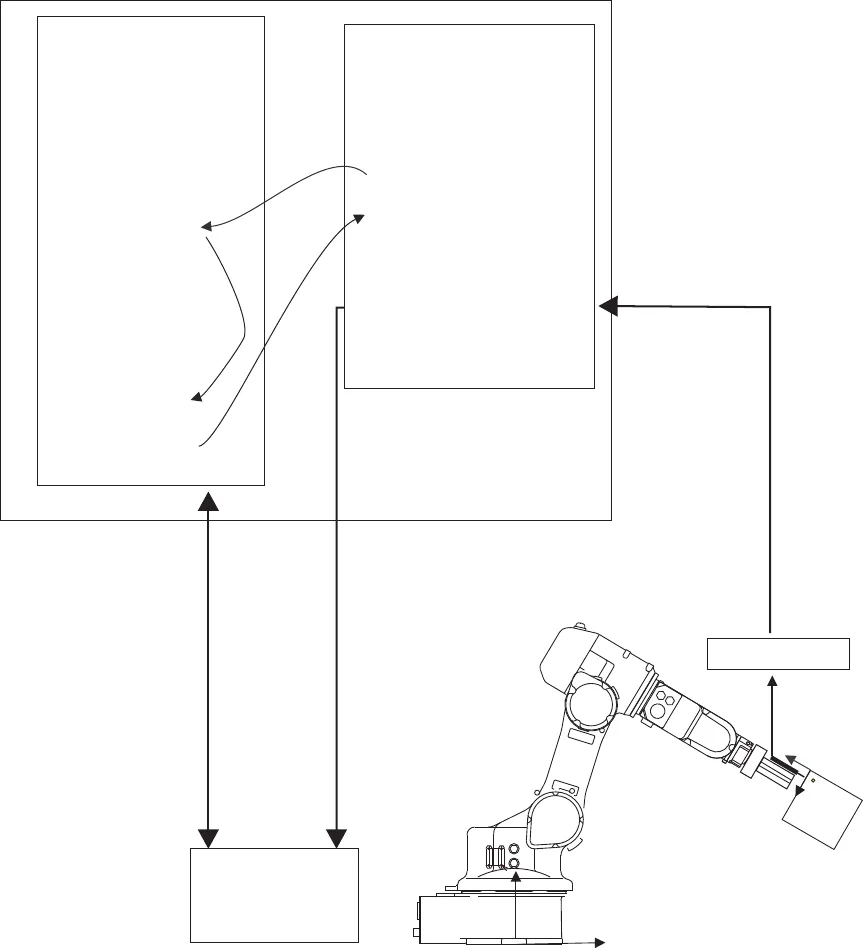
Slika 14: Blokovna shema merilnega sistema za dolo
ˇ
citev ponovljivosti robota
Na sliki 14 je prikazana blokovna shema merilnega sistema za dolo
ˇ
citev ponovljivosti. Robot je voden
s pomo
ˇ
cjo robotskega krmilnika EPSON RC170 in programskega paketa EPSON RC+5.0, ki te
ˇ
ce na ose-
bnem ra
ˇ
cunalniku. Izmerjene podatke z mikrometra zajemamo v okolju Matlab (verzija 2007a), ki te
ˇ
ce na
istem osebnem ra
ˇ
cunalniku. Okolje Matlab z nadzorno enoto mikrometra komunicira preko serijske pove-
zave RS232. Klic funkcije beri vrne trenutno vrednost premika mikrometra. Komunikacija med okoljem
Matlab in robotskim krmilnikom pa je izvedena preko TCP/IP povezave s pomo
ˇ
cjo uporabe funkcije Start-
TestSequence, ki robotskemu krmilniku posreduje celoštevilski parameter. Glede na vrednost parametra
robotski program izvede vejitev in skok na ustrezno funcijo, ki vsebuje zaporedje ukazov za gibanje. Na
sliki 14 sta v dveh blokih os ebnega ra
ˇ
cunalnika prikazana primera programske kode v okolju Matlab in
RC+5.0 za izvedbo serije n merilnih ponovitev izvedenih iz npr. smeri x.
13