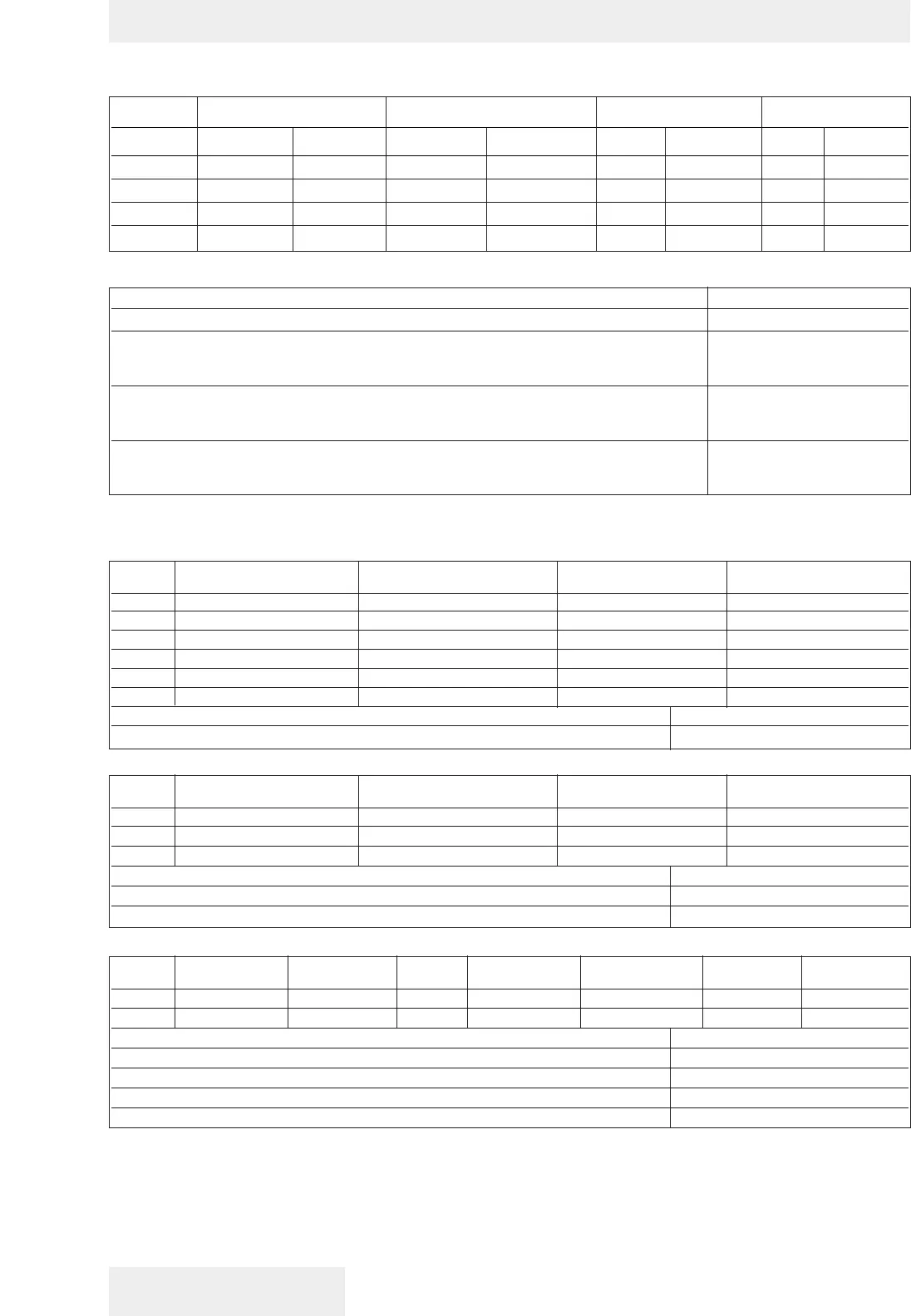
GOLDCUP CONTROLS CHARACTERISTICS
6
Feature Control press. Control press. Max. hysteresis @ Max. hysteresis @
max. displacement min. displacement max. displacement min. displacement
psi (bar) psi (bar) psi (bar) psi (bar)
0- 155-185 (10.7-12.7) 310-360 (21.3-24.8) 30 (2.1) 50 (3.4)
1- 185-215 (12.8-14.8) 410-460 (28.3-31.7) 30 (2.1) 50 (3.4)
2- 135-165 (9.3-11.3) 350-400 (24.1-27.6) 30 (2.1) 50 (3.4)
3- 60-90 (4.1-6.2) 225-275 (15.5-19.0) 30 (2.1) 50 (3.4)
6A MOTOR CONTROLS
*With connector terminal B at +15 Volts, terminal D at - 15 Volts. This polarity must be maintained for D.C. RVDT, Polarity is optional
for potentiometer.
700 FEEDBACK CONTROLS
Specifications Typ. Value
Input voltage +/- 15 Volts
Input Amperes
Potentiometer 3 ma
D.C. RVDT 30 ma
* Output Volts @ max displacement, 19° CW rotation facing control
Potentiometer +3.1 Volts
D.C. RVDT -2.3 Volts
Output impedance
Potentiometer 2.5 K Ohms
D.C. RVDT <1 Ohm
*
Specifications above are based on using a Jupiter 900 Driver with a 24 VDC supply and set at 120 Hz pulse width modulation.
Performance will vary when other controls are used. 100 to 200 Hz pulse width modulation is recommended.
8A, 8C PUMP CONTROL
8A MOTOR CONTROL
9A, 9C PUMP CONTROL 9A MOTOR CONTROL
Code Control press. Control press Max. hysteresis @ Max. hysteresis @
min. displacement max. displacement min. displacement max. displacement
psi (bar) psi (bar) psi (bar) psi (bar)
00 60-90 (4.1-6.2) 310-360 (21.3-24.8) 30 (2.1) 50 (3.4)
01 60-90 (4.1-6.2) 410-460 (28.3-31.7) 30 (2.1) 50 (3.4)
02 100-120 (6.9-8.3) 350-400 (24.1-27.6) 30 (2.1) 50 (3.4)
03 135-165 (9.3-11.4) 375-425 (25.9-29.3) 30 (2.1) 50 (3.4)
04 60-90 (4.1-6.2) 225-275 (15.5-19.0) 30 (2.1) 50 (3.4)
Torque for manual operation (no control pressure) begin stroke 7.5-20 in. lb.
(0.8-2.2 N·m)
Torque for manual operation (no control pressure) end stroke 28-58 in. lb. (3.2-6.5 N·m)
Code Control press. Control press Max. hysteresis @ Max. hysteresis @
min. displacement max. displacement min. displacement max. displacement
psi (bar) psi (bar) psi (bar) psi (bar)
0* 60-90 (4.1-6.2) 225-275 (15.5-19.0) 30 (2.1) 50 (3.4)
1* 235-265 (16.2-18.3) 410-460 (28.3-31.7) 30 (2.1) 50 (3.4)
Signal ports SAE - 4
Torque for manual operation (no control pressure) begin stroke 7.5-20 in. lb. (0.8-2.2 N·m)
Torque for manual operation (no control pressure) end stroke 28-58 in. lb. (3.2-6.5 N·m)
Code mA @min. mA @max. Code mA @max. mA @min. Coil Nom.
displacement displacement displacement displacement voltage resist.
00 360 +/- 60 650 +/- 110 0* 360 +/- 60 580 +/- 100 12 Volt 10 Ohm
01 180 +/- 30 325 +/- 55 1* 180 +/- 30 290 +/- 50 24 Volt 41 Ohm
*
Hysteresis- percent of full displacement 5% typ. 8% max.
*
Linearity - percent of full displacement within 8%
Manual override 3/16"(4.8 mm) internal hex
Torque to override (no signal current) 30 in.-lb (3.4 N•m) typ.
Mating connector (supplied) DIN 43650 type AF