14.2 Rover MEMS - MPi/SPi
, ~
- .:;
Overview of system operation
1 Introduction
--
, 11
Please read this overview of Rover MEMS
operation in conjunction with Chapter 2,
which describes some of the functions in
more detail.
The Rover MEMS (Modular Engine
ManagementSystem) was developed jointly by
Roverand Motorola, and first appeared in 1989
on Montego 2.0 carburettor and then MPi
vehicles. MEMS is a fully-integrated system
that controls primary ignition, fuelling and idle
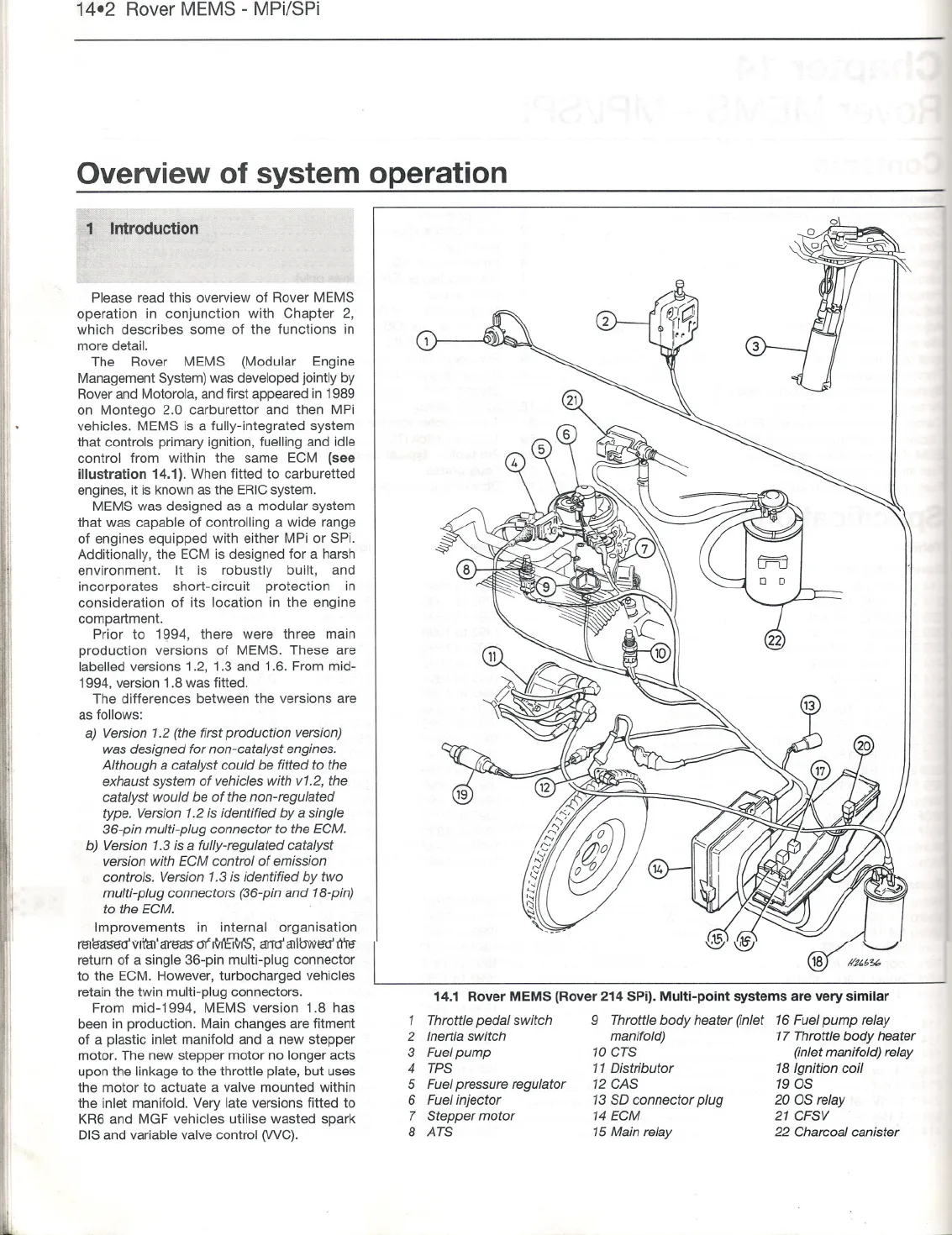
control from within the same ECM (see
illustration 14.1). When fitted to carburetted
engines, it is known as the ERICsystem.
MEMS was designed as a modular system
that was capable of controlling a wide range
of engines equipped with either MPi or SPi.
Additionally, the ECM is designed for a harsh
environment. It is robustly built, and
incorporates short-circuit protection in
consideration of its location in the engine
compartment.
Prior to 19.94, there were three main
production versions of MEMS. These are
labelled versions 1.2, 1.3 and 1.6. From mid-
1994, version 1.8 was fitted.
The differences between the versions are
as follows:
a) Version 1.2 (the first production version)
was designed for non-catalyst engines.
Although a catalyst could be fitted to the
exhaust system of vehicles with v1.2, the
catalyst would be of the non-regulated
type. Version 1.2 is identified by a single
36-pin multi-plug connector to the ECM.
b) Version 1.3is a fully-regulated catalyst
version with ECM control of emission
controls. Version 1.3is identified by two
multi-plug connectors (36-pin and 18-pin)
to the ECM. .
Improvements in internal organisation
reJ~as-en' 'llt'al' are-as- of Mt:MS, amr cnlbwan'1fie"
return of a single 36-pin multi-plug connector
to the ECM. However, turbocharged vehicles
retain the twin multi-plug connectors.
From mid-1994, MEMS version 1.8 has
been in production. Main changes are fitment
of a plastic inlet manifold and a new stepper
motor. The new stepper motor no longer acts
upon the linkage to the throttle plate, but uses
the motor to actuate a valve mounted within
the inlet manifold. Very late versions fitted to
KR6 and MGF vehicles utilise wasted spark
DIS and variable valve control NVc).
ifl
11
I~I
.,u
1I
t!
I
i
!
I
II~
I~
~
I
~I
~ !
i.
-
"-';::
~ -
::e
-
-
~_'C
-
.;-
-e
--
-=
.J"'-
-
-e
-
-::e
--~
~
-
::..r-.-
;-
- -
~a-
-
.-;;
--
"-
--'....
---
-
-
- -~
:::.e
-
=e
.. .
......
;s
:-a
Ba
14.1 RoverMEMS(Rover214SPi).Multi-point systemsare very similar
1 Throttlepedal switch 9 Throttlebody heater (inlet 16 Fuelpump relay
2 Inertiaswitch manifold) 17 Throttlebody heater
3 Fuelpump 10 CTS (inletmanifold)relay
4 TPS 11 Distributor 18 Ignitioncoil
5 Fuelpressure regulator 12 CAS 19 OS
6 Fuelinjector 13 SO connector plug 20 OS relay
7 Stepper motor 14ECM 21 CFSV
8 ATS 15 Mainrelay 22 Charcoalcanister
~ -
-
-....
--
, -
~
:ec
...-
:=
....